It's hard to believe but Driver-in-the-Loop simulation has been an increasingly vital tool for vehicle engineers for over 50 years now. From early efforts that involved strapping cars into unwieldy Stewart hexapod platforms, through to today's low latency and immersive simulators, the technology has come of age. The last ten years has seen the most dramatic change, with more developments in use cases and technologies than the previous decade.
Mind Tricks
Successful Driver-in-the-Loop simulation requires the human participant to be 'tricked' into reacting as they would in a real scenario based on simulated sensory information. In a driving simulator, the human senses responsible for optical (vision, haptic (touch), audio (sound) olfactory (smell) and vestibular (movement) reckoning are deceived to make a driver believe he or she is in an actual car on an actual road and it's this physiological interplay that has fuelled simulator demand and development.
Legacy aircraft technology gets grounded
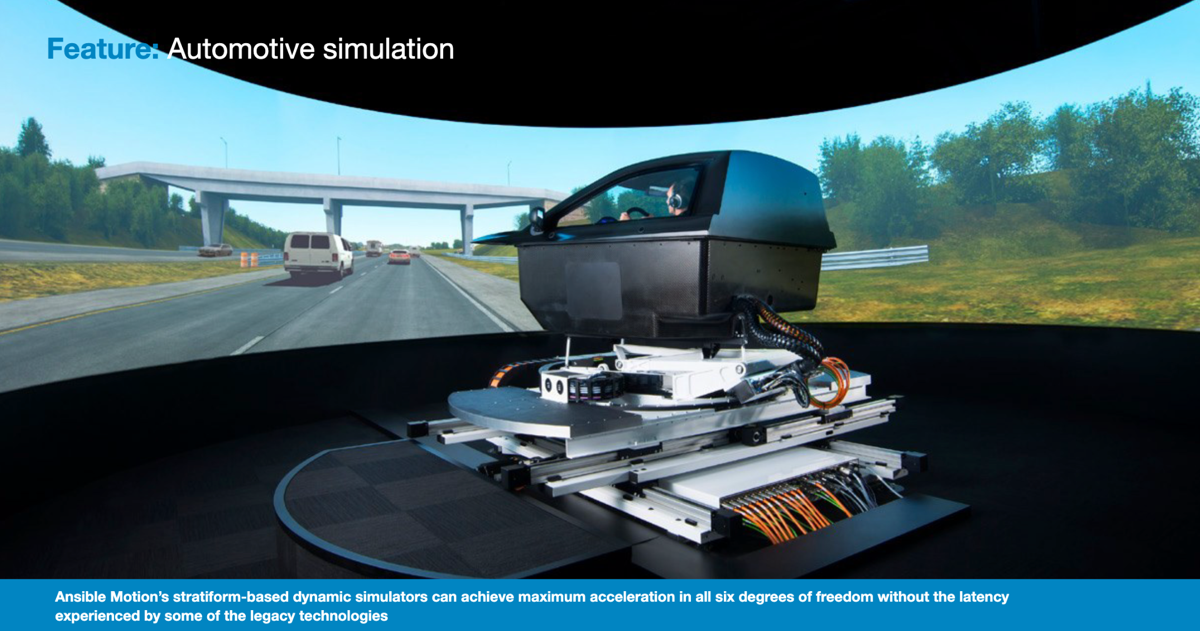
Increasingly, expert drivers and engineers have come to realise that the legacy Stewart (hexapod) technologies lifted directly from aviation applications, are not ideally suited to recreate the immersive dynamic environments needed for ground vehicles. That's because the dynamics of cars, trucks and specialty vehicles are typically characterised by short, sharp movements, not the low frequency motions characteristic of aircraft. As such, even the most agile fighter jets will lag behind your family car when it comes to high frequency directional changes. That's one of the prime reasons Ansible Motion chose to design and develop something different, a "stratiform' motion system; a layered machine with each stratum serving as independently controlled axes directly associated with real vehicle motion directions.
Read the full article on Design Products & Applications